


Premiestniteľný systém kontroly nákladu a vozidiel
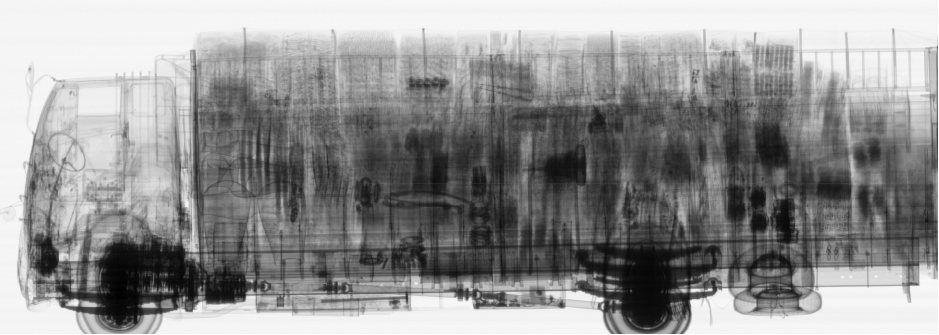
Premiestniteľný systém kontroly nákladu a vozidiel BGV6100 je vybavený elektronickým lineárnym urýchľovačom (Linac) a novým detektorom pevných látok PCRT, ktorý využíva röntgenové lúče s dvojitou energiou a pokročilé algoritmy identifikácie materiálu na dosiahnutie perspektívneho skenovania a zobrazovania nákladu a vozidla na identifikáciu pašovaného tovaru.Systém má dva pracovné režimy: režim jazdy autom a režim mobilného skenovania.V režime mobilného skenovania sa systém pohybuje po pozemnej koľajnici, aby skenoval nákladné vozidlá.Nasadenie systému zohľadňuje pohodlie používania na mieste.Na vstupe do vozidla je umiestnená ovládacia konzola.Personál front-end sprievodcu je zodpovedný za spustenie procesu kontroly po pripravenosti vozidla a môže sledovať celý proces kontroly počas celého procesu.Po zistení abnormality je možné proces kontroly okamžite zastaviť.Po dokončení interpretácie obrazu vozidla môže prekladač obrazu vozidla zozadu komunikovať s predným sprievodcom cez konzolu a môže poskytnúť výsledok interpretácie prostredníctvom príslušného varovného signálu.
- Väčšia priepustnosť, najmenej 120 nákladných vozidiel za hodinu v režime jazdy a najmenej 25 nákladných vozidiel za hodinu v režime mobilného skenovania
- Radiačná bezpečnosť pre vodiča, má funkciu automatického vylúčenia kabíny nákladného vozidla a jeden kľúčový prepínač do režimu mobilného skenovania
- Technológia IDE, podpora materiálovej diskriminácie
- Bohaté rozhranie pre integráciu systému
- Vyššia schopnosť prieniku ocele
- Pokročilý systém správy obrazových informácií.Ukladanie, vyhľadávanie, prezeranie, exportovanie a ďalšie funkcie informácií o vozidle, vrátane perspektívnych obrázkov, podporujú funkcie centralizovaného riadenia v sieti.
- Rozhranie obsluhy klienta: Návrh klientskeho operačného rozhrania softvérového systému zariadenia je primeraný a užívateľsky prívetivý, rozhranie je jasné a stručné, obsluha je pohodlná, konfigurácia funkčného modulu je intuitívna, rozloženie je rozumné a údržba je ľahké.





